Category:Drones/Flight-Controller/Firmware/FlightOne
| You are here | FlightOne (formerly RaceFlight)
|

Download FlightOne Configurator
FlightOne Configurator can be downloaded from this page and is available for Mac, Linux (32 and 64bit) and Linux (32 and 64 bit).
The following tutorial has been written for version 1.1.147.
Setup
Flash firmware

- The latest stable release can be found here: https://flightone.com/download
- The latest beta release can be found here: https://flightone.com/beta
- The full list (including unstable releases) can be found here: https://flightone.com/firmware/
- Flight Controller mode
- Back to flight controller mode that allows you to configure and customize firmware settings
- Update firmware
- This is a fast way to update your firmware to latest stable version.
- Note: Your current settings and configurations can be restored if your current firmware version are not too out of date.

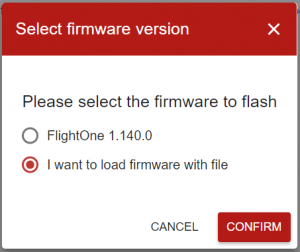
- DFU mode
- Boots the Flight Controller into DFU mode, allows the bootloader and firmware to be updated. Used when coming from a really old version or if you want to wipe settings completely, can also be used to restore a flight controller that no longer connects properly.
- Note: DFU mode may not work if s.port is connected
- Note: you don't need to solder boot pins for this to work
- From here, you can either select an automatic version or select a file:

- If your FC is not automatically recognized, use Zadig
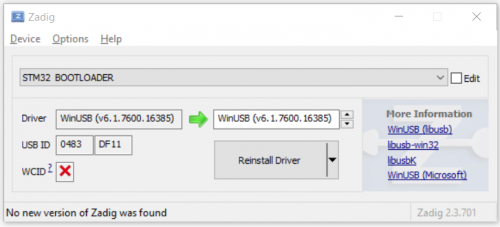
- Go to Options > List all devices
- Select STM32 BOOTLOADER from the dropdown
- Select the WinUSB driver
- Click on Reinstall driver

Wizard
Setup flight controller











Detect receiver


Setup radio




Calibrate motors

Fix motor direction & iddle



Manually setup
| Parameter | Description |
|---|---|
| ARMED | Pick the switch you want to arm with |
| ACROLEVEL | Angle not limited, returns to level when sticks are centered |
| LOGGING | Starts the blackbox logger |
| LEDMODE | Change will cycle through the modes |
| DIRECT | Reduced latency from sticks |
| BRAINDRAIN | Sharper feel and reponse |
| PROFILE3 | When this mode is active, it switches to PID profile 3 |
| LAUNCH | Allows quad to tilt forward and hold position on a launch stand |
| AUTOKI | Reduces ki the farther out the sticks are from center, can help remove bounce in some cases |
| VTXCHANNEL | Sets channel, band, power, and unlocks VTX. Channel and power can be set in the configuration tab |
| LEVEL | Is like angle mode, goes back to level mode, the angle of the quad is limited. More for beginners |
| FAILSAFE | Can be set to a switch |
| BUZZER | Turn buzzer on or off |
| LEDCOLOR | Change will cycle through 7 colors |
| VTXON | To turn off and on the VTX. Requires SmartAudio |
| PROFILE2 | When this mode is active, it switches to PID Profile 2 |
| QUOPA | Reverses motors and automatically flips over and upside down quad |
| MOTORBEEP | Makes the motors beep to find a lost quad |
| KILLSWITCH | Changes channel to the kill channel set in the configuration tab and kills the quad completely so that it can't be rearmed |
| OSDMENU | When activated, brings up the FL1 menu in the OSD |
Arming issues
Will show possible issues if you are not able to arm the quad.

Bind Spektrum

Thank you for your comprehension.
Radio Data
Shows values received from the radio (useful to identify aux)

Telemetry
Shows data from the gyroscope.

Configuration
Main

For QUOPA, you can choose between:
- Automatic 2 motor mode: Only uses 1 or 2 motors that are unstuck auto-flip back over. Can wiggle sticks to aid flip
- Manual 2 motor mode: Does not assist in flip over. You must use sticks to flip quad over yourself
Voltage
Use the offset to correct voltage if you have a different value than the one measured with a voltmeter.

Radio settings

- Receiver protocol
- Disabled, Spektrum RX Pin, Spektrum TX Pin, SBUS RX Pin, SBUS TX Pin, SUMD RX Pin, SUMD TX Pin, IBUS RX Pin, IBUS TX Pin, DSM2 RX Pin, DSM2 TX Pin, CPPM RX Pin, CPPM TX Pin, CRSF RX Pin, CRSF TX Pin
- Receiver port
- UART 1, UART 3, UART 4, UART 6
Test motors & Idle motor test

- Test motors: Runs a test on motors to get their noise score which can be used to diagnose a bad motor
- Motors iddle: percentage of motor rotation when armed (5% is the default value)
- Idle motor test: If you need to check single motor spinning or direction
Telemetry


Refer to the complete pinout diagram for more information on ports.
Telemetry
- Crossfire Telemetry on TX3
- recommended not to enable (I've been told by Raceflight on their Facebook support page that it is not recommended using telemetry for crossfire [because] you can't fly with others when using it, and you already have OSD so it's not needed.)
- Taranis Telemetry (RX3 pin)
- recommended to enable (will enable VTX and PID control from OSD via SmartAudio)
- On my Taranis, I was able to gather following values: 1RSS, 2RSS, RQly, RSMR, RFMD, TPWR, TRSS, TQly, TSMR
- Spektrum Telemetry
- for Spektrum
VTX Pitmode Type


VTX settings
- Kill band
- A, B, E, FatShark, Race, Low
- Kill channel
- 1-8
- VTX Power
- 25mW, 200mW, 500mW, 8000mW
- VTX Band
- A, B, E, FatShark, Race, Low
- VTX Channel
- 1-8
- VTX Device
- SmartAudio, TrampTLM, Other
- SmartAudio
- USART 3 TX, USART 3 RX
LED

Electronic Speed Control (ESC) settings

- Blheli32 telemetry
- Get telemetry from the ESC
- Notice that in order to use Blheli32 telemetry, you have to use DShot or Proshot ESC protocol. Blheli32 telemetry isn't available for Multishot
- ESC type
- blheli_s, blheli32, other
- ESC protocol
- MultiShot (Recommended), MultiShot 16 kHz, DShot1200, DShot600, ProShot 16kHz, ProShot 32kHz
- Passthrough Cleanflight
- The board will automatically install CleanFlight in order to enable Blheli passthrough
- Once done programming your ESCs click reinstall Flight One button in the Flight One configurator and the board will reflash and restore previous settings
OSD and Camera Control
OSD

- OSD
- Choose Internal OSD if your FC is RevoltOSD
- Disabled, Tx1, Tx2, Tx3, Tx4, Tx5, Tx6, Internal OSD
- OSD Type
- NTSC, PAL, Auto
- OSD Font
- mega font biggest numbers possible for max visibility
- small font, same as original font smaller characters
- medium font / MewoFPV's font

Possible values for the OSD:
- None
- Pilot name
- Craft name
- Time armed
- Battery picture mah
- Battery picture volt
- Voltage
- mah
- RSSI
- Crosshair
- Current
- Volatage Per Cell
- Average ESC temp
- ESC 1 eRPM
- ESC 2 eRPM
- ESC 3 eRPM
- ESC 4 eRPM
- ESC 1 current
- ESC 2 current
- ESC 3 current
- ESC 4 current
Camera Control
If your camera has an OSD pin, you can wire it to the RevoltOSD as follows, to be able to control the camera settings from the flight controller:

On July 2018, this feature (confirmed on F1 facebook support page) is not yet implemented in the current version of flightone-configurator.
PID Tuning
PID
Ready for use PID tunes
Supported default configurations
| Setup | Roll | Pitch | Yaw | ||||||
|---|---|---|---|---|---|---|---|---|---|
| P | I | D | P | I | D | P | I | D | |
| Default | 37 | 33 | 33 | 36 | 35 | 33 | 51 | 36 | 33 |
| Skitzo freestyle | 61 | 37 | 39 | 58 | 37 | 38 | 54 | 37 | 32 |
| Black Bird freestyle | 54 | 37 | 36 | 51 | 39 | 36 | 58 | 40 | 33 |
| RC12 freestyle | 36 | 31 | 38 | 34 | 32 | 33 | 49 | 30 | 25 |
| 419 tune | 32 | 29 | 41 | 31 | 30 | 37 | 44 | 30 | 34 |
| Captain Vanover tune | 33 | 33 | 36 | 33 | 33 | 36 | 44 | 33 | 28 |
| 2.5 inch tune | 18 | 20 | 21 | 20 | 20 | 23 | 19 | 20 | 20 |
| 3inch | 35 | 33 | 32 | 33 | 32 | 29 | 39 | 30 | 25 |
| 6inch | 31 | 30 | 33 | 31 | 30 | 33 | 43 | 30 | 33 |
| 7inch 4S | 64 | 41 | 52 | 63 | 41 | 48 | 85 | 41 | 44 |

Load custom defaults
This will enable to enter the URL of a configuration that you found on the following resource: https://flightone.com/tuneconfigs/

PID tuning

Signal smoothing

RC Smoothing will smooth control input from stick movement
- RC Smoothing
- Percentage of smoothing for the stick movements
- Good for 5 inches quad
- New RC Smoothing
- Number of degrees/second
- Relevant for larger quads
Limit settings

- CG Adjustment
- Between 80% and 120%. Good value around 90%
- kD and kI limits
- Percentage of limitation on I and D of your overall PID value (e.g. kD set to 0.4 means that you are limiting D to 40% of your overall PID values)
- Default to 0.4
- Roll, Pitch and Yaw deadband
- Percentage of stick movement that is ignored.
- 1% of the stick is ignored, which is the default value for Taranis radio, because gimbals are less accurate in the center
TPA

Filters
Ready for use filters

| Setup | Filtering | D Filtering | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Gyro Smoothing | Stage 1 Filter type | Stage 1 Roll Low Pass Cut Off | Stage 1 Pitch Low Pass Cut Off | Stage 1 Yaw Low Pass Cut Off | Stage 2 Filter type | Stage 2 Roll Low Pass Cut Off | Stage 2 Pitch Low Pass Cut Off | Stage 2 Yaw Low Pass Cut Off | Stage 1 Filter type | Stage 1 Roll kD Filtering | Stage 1 Pitch kD Filtering | Stage 1 Yaw kD Filtering | Stage 2 Filter type | Stage 2 Roll kD Filtering | Stage 2 Pitch kD Filtering | Stage 2 Yaw kD Filtering | |
| Default | Off | RC FIR2 Filter | 170 | 170 | 170 | RC FIR2 Filter | 70 | 70 | 70 | RC FIR2 Filter | 70 | 70 | 70 | Disabled | - | - | - |
| Low | Off | Frequency Filter | 240 | 240 | 240 | Frequency Flilter | 70 | 70 | 70 | BiQuad Filter | 70 | 70 | 70 | Disabled | - | - | - |
| Medium | Medium | RC FIR2 Filter | 200 | 200 | 200 | Frequency Filter | 70 | 70 | 70 | RC FIR2 Filter | 70 | 70 | 70 | Disabled | - | - | - |
| High | Medium | RC FIR2 Filter | 200 | 200 | 200 | RC FIR2 Filter | 70 | 70 | 70 | RC FIR2 Filter | 70 | 70 | 70 | Disabled | - | - | - |
| Predictive | High | Predictive Filter | - | - | - | Disabled | - | - | - | RC FIR2 Filter | 70 | 70 | 70 | Disbaled | - | - | - |
Filtering

- Gyro smoothing
- Off, Medium, High, Very high
- In most pre-configurations, you can disable gyro smoothing
- Filter type (stage 1 and stage 2)
- 2 stage filtering. Stage 1 filter is run first, and stage 2 filter is run second.
- OG Filter, Predictive Filter, BiQuad Filter, Frequency Filter, RC FIR2 Filter, Fake Kalman Filter, Brick Wall, Disabled
D Filtering

Rates
Ready for use rates
Supported default configurations
| Setup | Roll | Pich | Yaw | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Rate | Expo | Acro Plus | Rate | Expo | Acro Plus | Rate | Expo | Acro Plus | |
| Beginner Rates | 300 | 50 | 20 | 300 | 50 | 20 | 300 | 50 | 20 |
| Default Rates | 400 | 50 | 140 | 400 | 50 | 140 | 400 | 50 | 140 |
| Acro Rates | 400 | 50 | 200 | 400 | 50 | 200 | 400 | 50 | 200 |
| Shaun Rates | 258 | 50 | 58 | 258 | 50 | 58 | 147 | 20 | 40 |
| Skitzo Rates | 350 | 60 | 190 | 350 | 60 | 190 | 350 | 60 | 190 |
| BrainDrain Rates | 320 | 60 | 0 | 300 | 60 | 0 | 280 | 60 | 0 |
| Captain Vanover Rates | 350 | 40 | 75 | 350 | 40 | 75 | 350 | 40 | 75 |

Rates

DPS

Throttle curve

Profile
- You can create up to 3 profiles to switch between different PID, rates and filter settings.
- These profiles can be easily accessed via switches on the Taranis, using PROFILE2 and PROFILE3 from the Manual setup section of the SETUP tab.
- You can rename profiles to give them explicit names
- You can also import and export profiles

ESC
Shows ESC values from the ESC telemetry

Logging
Logging
- Assign a switch on the Taranis to the LOGGING param on the Manual setup section of the SETUP tab.
- Enable the LOGGING switch when the quad is powered on to start logging
- Disable the LOGGING switch to stop logging
Analyze logs
- Download the Betaflight Blackbox Explorer
- Go to logging and click on the Download button

- It will automatically mount a new drive on your computer, that you can use to read logs from the Betaflight Blackbox Explorer.
Console
Commands
| Command | Description |
|---|---|
| set param=values | set value for param |
| save | apply changes |
| flashmsd | run this command to access MSD mode for fast log downloads |
| vtxinfo | Will print vtx info to the console (make sure you remove props and plug the battery)
#me vtx.vtxDevice=2 #me vtx.vtxBand=2 #me vtx.vtxChannel=0 #me vtx.vtxBandChannel=e1 #me vtx.vtxPower=3 #me vtx.vtxPit=VTX in Pit Mode #me vtx.vtxRegion=0 #me vtx.vtxFrequency=5705 |
| vtxon | Will turn on the VTX |
| vtxpit | Will send the VTX pit mode command (Warning: TBS VTX will not enter pit mode once it is on until you power cycle the VTX) |
| vtxbandchannel |
Will set the band channel using strings Examples:
|
1wire commands (ESC control)
Notes:
- All settings can be changed in the ESC tab of the GUI, but if you wish to use the Console to make changes to your ESC settings here is the list of commands.
- Before entering any command, remove props and plug the battery.
- Always 1wire save after any changes.
List of available commands:
| Command | Description |
|---|---|
| 1wire read | reads the esc info |
| 1wire save | saves 1wire changes |
| 1wire auto | Automatically updates all esc firmware |
| 1wire stop | stops the 1wire connection |
| 1wire m0/1/2/3=beacondelay=2min | Change esc beacon setting |
| 1wire m0/1/2/3=upgrade | upgrades esc firmware |
| 1wire m0/1/2/3=timing=medium/high/low | Changes esc timing |
| 1wire m0/1/2/3=brakeonstop=disable/enable | changes esc stop |
| 1wire m0/1/2/3=direction=reversed/normal | changes motor direction |
| 1wire m0/1/2/3=beepstrength= 01/91/92/93/94/40 |
|
Example
1wire read 1wire m0=beepstrength=93 1wire m1=beepstrength=93 1wire m2=beepstrength=93 1wire m3=beepstrength=93 1wire save 1wire stop m0 = Motor 1, m1 = Motor 2, m2 = Motor 3, m3 = Motor 4
Parameters
| Parameter | Supported in the GUI? | Description | Example |
|---|---|---|---|
| modes ARMED | Y | Assigned switch from armed mode | modes ARMED=5=70=100 |
| modes LEVEL | Y | Enable level flight mode from radio switch | modes LEVEL=0=0=0 |
| modes ACROLEVEL | Y | Enable acrolevel from radio switch | modes ACROLEVEL=0=0=0 |
| modes FAILSAFE | Y | Enable failsafe from radio switch | modes FAILSAFE=0=0=0 |
| modes LOGGING | Y | Enable logging from radio switch | modes LOGGING=0=0=0 |
| modes BUZZER | Y | Enable buzzer from radio switch | modes BUZZER=7=-30=30 |
| modes LEDMODE | Y | modes LEDMODE=0=0=0 | |
| modes LEDCOLOR | Y | modes LEDCOLOR=0=0=0 | |
| modes DIRECT | Y | modes DIRECT=0=0=0 | |
| modes VTXON | Y | modes VTXON=0=0=0 | |
| modes BRAINDRAIN | Y | modes BRAINDRAIN=0=0=0 | |
| modes PROFILE2 | Y | Enable profile 2 | modes PROFILE2=0=0=0 |
| modes PROFILE3 | Y | Enable profile 3 | modes PROFILE3=0=0=0 |
| modes QUOPA | Y | Enable QUOPA mode from radio switch | modes QUOPA=6=-30=30 |
| modes LAUNCH | Y | modes LAUNCH=0=0=0 | |
| modes MOTORBEEP | Y | modes MOTORBEEP=0=0=0 | |
| modes AUTOKI | Y | modes AUTOKI=0=0=0 | |
| modes KILLSWITCH | Y | modes KILLSWITCH=0=0=0 | |
| modes VTXCHANNEL | Y | modes VTXCHANNEL=0=0=0 | |
| modes OSDMENU | Y | modes OSDMENU=0=0=0 | |
| throttlecurvex (where x=1,2,3) | Y | throttlecurve1 0=7=15=29=42=58=75=87=100 throttlecurve2 0=12=25=37=50=62=75=87=100 throttlecurve3 0=12=25=37=50=62=75=87=100 | |
| tpakpx (where x=1,2,3) | Y | tpakp1 100=100=100=100=90=80=75=70=65 tpakp2 100=100=100=95=95=95=96=100=100 tpakp3 100=100=100=95=95=95=96=100=100 | |
| tpakix (where x=1,2,3) | Y | tpaki1 100=100=100=100=100=100=100=100=100 tpaki2 104=100=95=95=95=95=95=100=104 tpaki3 104=100=95=95=95=95=95=100=104 | |
| tpakdx (where x=1,2,3) | Y | tpakd1 100=100=100=95=95=95=96=100=100 tpakd2 100=100=100=95=95=95=96=100=100 tpakd3 100=100=100=95=95=95=96=100=100 | |
| mixer_type | ? | set mixer_type=0 | |
| famx | ? |
|
set famx=98 |
| bounce_guard | ? | affects strength of bounce guard | set bounce_guard=0.000 |
| esc_protocol | Y | set esc_protocol=0 | |
| m_dir | Y | set m_dir=5 | |
| esc_frequency | Y | set esc_frequency=32000 | |
| idle_percent | Y | Percentage of motor spinning when quad is armed | set idle_percent=5.000 |
| idle_percent_inv | ? | set idle_percent_inv=8.000 | |
| spin_rec_str | Y | set spin_rec_str=750.000 | |
| quopa_style | Y |
QUOPA_STYLE_AUTO = 0 (normal opperation) QUOPA_STYLE_SEMIAUTO = 1 (allows increased speed from right stick input) QUOPA_STYLE_MANUAL = 2 (Only responds to right stick input) QUOPA_STYLE_AUTO_2 = 3 (normal opperation using two motors at a time) QUOPA_STYLE_SEMIAUTO_2 = 4 (allows increased speed from right stick input using two motors at a time) QUOPA_STYLE_MANUAL_2 = 5 (Only responds to right stick input using two motors at a time) |
set quopa_style=4 |
| esc_type | Y | set esc_type=1 | |
| moutx (where x=1,2,3,4,5,6,7,8) | Y |
set mout1=1 set mout2=2 set mout3=3 set mout4=0 set mout5=4 set mout6=5 set mout7=6 set mout8=7 | |
| mottoled | ? | set mottoled=0 | |
| en_throttle | ? | set en_throttle=0.150 | |
| led_count | ? | set led_count=16 | |
| led_red | Y | set led_red=10 | |
| led_green | Y | set led_green=0 | |
| led_blue | Y | set led_blue=0 | |
| led_mode | Y | set led_mode=0 | |
| led_with_usb | ? |
|
set led_with_usb=0 |
| telem_smartaudio | Y |
Port used for SmartAudio telemetry:
|
set telem_smartaudio=23 |
| telem_sport | ? | Port used for s.port | to enable s.port on rx pin 3:
set telem_sport=14 |
| telem_spek | ? | to enable spektrum telemtry on USART used by the spektrum Rx | set telem_spek=0 |
| telem_msp | ? |
To enable MSP telemtry output on selected USART RX and TX pin
|
The following command lines will enable MSP telemtry on usart 3's TX pin at 115,200 baud: set telem_msp=3 save |
| telem_rfosd | ? | set telem_rfosd=27 | |
| telem_tramp | ? | set telem_tramp=0 | |
| telem_crsf | Y | set telem_crsf=0 | |
| kill_ch | ? | set kill_ch=47 | |
| vtx_ch | ? | set vtx_ch=39 | |
| vtx_power | ? | Sets the power of the VTX. Possible values are:
|
set vtx_power=3 |
| esc_telem | Y | set esc_telem=0 | |
| temp_in_f | ? | set temp_in_f=0 | |
| telem_mavlink | ? | To enable Mavlink telemtry output on selected USART RX and TX pin (set telem_mavlink=1,2,3,4,5 or 6 | set telem_mavlink=0 |
| adc_current_factor | Y |
set adc_current_factor=34.2 save
set adc_current_factor=42 save |
set adc_current_factor=42.000 |
| voffset | Y | set voffset=1.000 | |
| mahoffset | ? | set mahoffset=1.000 | |
| vtx_pitmode_type | Y |
set vtx_pitmode_type=0 (default, VTX will always turn on after a power cycle)
set vtx_pitmode_type=0 save vtxinfo vtxpit vtxon
set vtx_pitmode_type=1 (VTX will default to pit mode after power cycle)
set vtx_pitmode_type=1 save vtxinfo vtxpit vtxon |
set vtx_pitmode_type=0 |
| vbat_buzzer | N | Buzzer alarm when per cell voltage is below defined threshold (vbat_cutoff) | set vbat_buzzer=1 |
| vbat_cutoff | N | Per cell voltage threshold to trigger buzzer alarm (if vbat_buzzer set to 1) | set vbat_cutoff=3.799 |
| bat_size | N | bat_size variable for crossfire telemetry (measured in mAh) | set bat_size=1300 |
| crsf_otx_cur_hack | ? | Will change crsf telemetry to display mah used in place of battery capacity since openTX does not support battery usage (default is on which is 1) | set crsf_otx_cur_hack=1 |
| gyro_rotation | ? | Used for the orientation of the board | set gyro_rotation=0 |
| board_calibrated | ? | set board_calibrated=1 | |
| man_gy_roll_angle | ? | Used for the orientation of the board. set man_gy_roll_angle=-360 through 360 (rolling right is positive, left is negative, 0, 360 and -360 are the same point, a board upright and level with the horizon is 0) | set man_gy_roll_angle=0.000 |
| man_gy_pitch_angle | ? | Used for the orientation of the board. set man_gy_pitch_angle=-360 through 360 (pitching up is positive, down is negative, 0, 360 and -360 are the same point, a board upright and level with the horizon is 0) | set man_gy_pitch_angle=0.000 |
| man_gy_yaw_angle | ? | Used for the orientation of the board. set man_gy_yaw_angle=-360 through 360 (yawing right is positive, left is negative, 0, 360 and -360 are the same point, a board facing directly foward in relation to direction of travel is 0) | set man_gy_yaw_angle=0.000 |
| wiz_trkr | ? | set wiz_trkr=55 | |
| tune_trkr | ? | set tune_trkr=0 | |
| rf_loop_ctrl | ? | set rf_loop_ctrl=20 | |
| craft_name | Y | set craft_name=AstroX | |
| pilot_name | Y | set pilot_name=Pilou | |
| pnamex (where x=1,2,3) | Y | Custom name for profile 1, 2 and 3 | set pname1=Profile1 |
| rowx (where x=1-16) | ? |
set row1=0 set row2=524288 set row3=0 set row4=0 set row5=0 set row6=0 set row7=0 set row8=0 set row9=0 set row10=0 set row11=0 set row12=327680 set row13=393984 set row14=0 set row15=0 set row16=0 | |
| osdtype | Y | set osdtype=0 | |
| charmap | Y | set charmap=0 | |
| stick_curvex (where x=1,2,3) | ? | set stick_curve1=4 | |
| nsmoothingx (where x=1,2,3) | ? | set nsmoothing1=0 | |
| rc_smoothingx (where x=1,2,3) | Y | You can range it from 0.1 to 4.0 to decrease or increase the smoothing effect with 1.0 being default. Does not function in direct mode | set rc_smoothing1=1.000 |
| pitch_ratex (where x=1,2,3) | ? | set pitch_rate1=400.000 | |
| roll_ratex (where x=1,2,3) | ? | set roll_rate1=400.000 | |
| yaw_ratex (where x=1,2,3) | ? | set yaw_rate1=400.000 | |
| pitch_acropx (where x=1,2,3) | ? | set pitch_acrop1=140.000 | |
| roll_acropx (where x=1,2,3) | ? | set roll_acrop1=140.000 | |
| yaw_acropx (where x=1,2,3) | ? | set yaw_acrop1=140.000 | |
| pitch_expox (where x=1,2,3) | ? | set pitch_expo1=50.000 | |
| roll_expox (where x=1,2,3) | ? | set roll_expo1=50.000 | |
| yaw_expox (where x=1,2,3) | ? | set yaw_expo1=50.000 | |
| yaw_kpx (where x=1,2,3) | ? | set yaw_kp1=54.000 | |
| roll_kpx (where x=1,2,3) | ? | set roll_kp1=61.000 | |
| pitch_kpx (where x=1,2,3) | ? | set pitch_kp1=58.000 | |
| yaw_kix (where x=1,2,3) | ? | set yaw_ki1=37.000 | |
| roll_kix (where x=1,2,3) | ? | set roll_ki1=37.000 | |
| pitch_kix (where x=1,2,3). | ? | set pitch_ki1=37.000 | |
| yaw_kdx (where x=1,2,3) | ? | set yaw_kd1=32.000 | |
| roll_kdx (where x=1,2,3) | ? | set roll_kd1=39.000 | |
| pitch_kdx (where x=1,2,3) | ? | set pitch_kd1=38.000 | |
| kd_limitx (where x=1,2,3) | ? | set kd_limit1=0.400 | |
| ki_limitx (where x=1,2,3) | ? | set ki_limit1=0.449 | |
| slpx (where x=1,2,3) | ? | Kp for outter loop of self leveling modes for selected profile (1, 2, 3) | set slp1=5.000 |
| slix (where x=1,2,3) | ? | Ki for outter loop of self leveling modes for selected profile (1, 2, 3) | set sli1=0.100 |
| slax (where x=1,2,3) | ? | Max angle in degrees allowed for self leveling modes | set sla1=35.000 |
| sldx (where x=1,2,3) | ? | set sld1=0.029 | |
| sm_filterx (where x=1,2,3) | ? | set sm_filter1=3 | |
| sm_filtex (where x=1,2,3) | ? | set sm_filter2=1 | |
| sm_filterx (where x=1,2,3) | ? | set sm_filter3=1 | |
| filts1_typex (where x=1,2,3) | ? | set filts1_type1=1 | |
| filts1_yawax (where x=1,2,3) | ? | set filts1_yawa1=200.000 | |
| filts1_rollax (where x=1,2,3) | ? | set filts1_rolla1=200.000 | |
| filts1_pitchax (where x=1,2,3) | ? | set filts1_pitcha1=200.000 | |
| filts1_yawbx (where x=1,2,3) | ? | set filts1_yawb1=120.000 | |
| filts1_rollbx (where x=1,2,3) | ? | set filts1_rollb1=120.000 | |
| filts1_pitchbx (where x=1,2,3) | ? | set filts1_pitchb1=120.000 | |
| filts2_typex (where x=1,2,3) | ? | set filts2_type1=8 | |
| filts2_yawax (where x=1,2,3) | ? | set filts2_yawa1=250.000 | |
| filts2_rollax (where x=1,2,3) | ? | set filts2_rolla1=250.000 | |
| filts2_pitchax (where x=1,2,3) | ? | set filts2_pitcha1=250.000 | |
| filts2_yawbx (where x=1,2,3) | ? | set filts2_yawb1=70.000 | |
| filts2_rollbx (where x=1,2,3) | ? | set filts2_rollb1=70.000 | |
| filts2_pitchbx (where x=1,2,3) | ? | set filts2_pitchb1=70.000 | |
| dfilts1_typex (where x=1,2,3) | ? | set dfilts1_type1=6 | |
| dfilts1_yawax (where x=1,2,3) | ? | set dfilts1_yawa1=70.000 | |
| dfilts1_rollax (where x=1,2,3) | ? | set dfilts1_rolla1=70.000 | |
| dfilts1_pitchax (where x=1,2,3) | ? | set dfilts1_pitcha1=70.000 | |
| dfilts1_yawbx (where x=1,2,3) | ? | set dfilts1_yawb1=120.000 | |
| dfilts1_rollbx (where x=1,2,3) | ? | set dfilts1_rollb1=120.000 | |
| dfilts1_pitchbx (where x=1,2,3) | ? | set dfilts1_pitchb1=120.000 | |
| dfilts2_typex (where x=1,2,3) | ? | set dfilts2_type1=8 | |
| dfilts2_yawax (where x=1,2,3) | ? | set dfilts2_yawa1=0.000 | |
| dfilts2_rollax (where x=1,2,3) | ? | set dfilts2_rolla1=0.000 | |
| dfilts2_pitchax (where x=1,2,3) | ? | set dfilts2_pitcha1=0.000 | |
| dfilts2_yawbx (where x=1,2,3) | ? | set dfilts2_yawb1=70.000 | |
| dfilts2_rollbx (where x=1,2,3) | ? | set dfilts2_rollb1=70.000 | |
| dfilts2_pitchbx (where x=1,2,3) | ? | set dfilts2_pitchb1=70.000 | |
| afilts1_typex (where x=1,2,3) | ? | set afilts1_type1=2 | |
| afilts1_yawax (where x=1,2,3) | ? | set afilts1_yawa1=120.000 | |
| afilts1_rollax (where x=1,2,3) | ? | set afilts1_rolla1=120.000 | |
| afilts1_pitchax (where x=1,2,3) | ? | set afilts1_pitcha1=120.000 | |
| afilts1_yawbx (where x=1,2,3) | ? | set afilts1_yawb1=120.000 | |
| afilts1_rollbx (where x=1,2,3) | ? | set afilts1_rollb1=120.000 | |
| afilts1_pitchbx (where x=1,2,3) | ? | set afilts1_pitchb1=120.000 | |
| afilts2_typex (where x=1,2,3) | ? | set afilts2_type1=2 | |
| afilts2_yawax (where x=1,2,3) | ? | set afilts2_yawa1=25.000 | |
| afilts2_rollax (where x=1,2,3) | ? | set afilts2_rolla1=25.000 | |
| afilts2_pitchax (where x=1,2,3) | ? | set afilts2_pitcha1=25.000 | |
| afilts2_yawbx (where x=1,2,3) | ? | set afilts2_yawb1=120.000 | |
| afilts2_rollbx (where x=1,2,3) | ? | set afilts2_rollb1=120.000 | |
| afilts2_pitchbx (where x=1,2,3) | ? | set afilts2_pitchb1=120.000 | |
| tpa_kp_curve_typex (where x=1,2,3) | Y | Set TPA curve for P, for selected profile (1, 2, 3) | set tpa_kp_curve_type1=0 |
| tpa_ki_curve_typex (where x=1,2,3) | Y | Set TPA curve for I, for selected profile (1, 2, 3) | set tpa_ki_curve_type1=0 |
| tpa_kd_curve_typex (where x=1,2,3) | Y | Set TPA curve for D, for selected profile (1, 2, 3) | set tpa_kd_curve_type1=0 |
| rx_protocol | ? | set rx_protocol=20 | |
| rx_usart | ? | set rx_usart=0 | |
| arm_method | Y | Double-Single arm method is set arm_method=0 | set arm_method=1 |
| rx_inv_direction | ? | set rx_inv_direction=0 | |
| pitch_deadband | ? | set pitch_deadband=0.014 | |
| roll_deadband | ? | set roll_deadband=0.014 | |
| yaw_deadband | ? | set yaw_deadband=0.014 | |
| throttle_deadband | ? | set throttle_deadband=0.000 | |
| aux1_deadband | ? | set aux1_deadband=0.000 | |
| aux2_deadband | ? | set aux2_deadband=0.000 | |
| aux3_deadband | ? | set aux3_deadband=0.000 | |
| aux4_deadband | ? | set aux4_deadband=0.000 | |
| pitch_midrc | ? | set pitch_midrc=990 | |
| roll_midrc | ? | set roll_midrc=990 | |
| yaw_midrc | ? | set yaw_midrc=992 | |
| throttle_midrc | ? | set throttle_midrc=990 | |
| aux1_midrc | ? | set aux1_midrc=992 | |
| aux2_midrc | ? | set aux2_midrc=992 | |
| aux3_midrc | ? | set aux3_midrc=992 | |
| aux4_midrc | ? | set aux4_midrc=992 | |
| pitch_minrc | ? | set pitch_minrc=172 | |
| roll_minrc | ? | set roll_minrc=172 | |
| yaw_minrc | ? | set yaw_minrc=172 | |
| throttle_minrc | ? | set throttle_minrc=172 | |
| aux1_minrc | ? | set aux1_minrc=172 | |
| aux2_minrc | ? | set aux2_minrc=172 | |
| aux3_minrc | ? | set aux3_minrc=172 | |
| aux4_minrc | ? | set aux4_minrc=172 | |
| pitch_maxrc | ? | set pitch_maxrc=1809 | |
| roll_maxrc | ? | set roll_maxrc=1809 | |
| yaw_maxrc | ? | set yaw_maxrc=1809 | |
| throttle_maxrc | ? | set throttle_maxrc=1809 | |
| aux1_maxrc | ? | set aux1_maxrc=1809 | |
| aux2_maxrc | ? | set aux2_maxrc=1809 | |
| aux3_maxrc | ? | set aux3_maxrc=1809 | |
| aux4_maxrc | ? | set aux4_maxrc=1809 | |
| pitch_map | ? | set pitch_map=2 | |
| roll_map | ? | set roll_map=1 | |
| yaw_map | ? | set yaw_map=3 | |
| throttle_map | ? | set throttle_map=0 | |
| aux1_map | ? | set aux1_map=4 | |
| aux2_map | ? | set aux2_map=5 | |
| aux3_map | ? | set aux3_map=6 | |
| aux4_map | ? | set aux4_map=7 | |
| aux5_map | ? | set aux5_map=8 | |
| aux6_map | ? | set aux6_map=9 | |
| aux7_map | ? | set aux7_map=10 | |
| aux8_map | ? | set aux8_map=11 | |
| aux9_map | ? | set aux9_map=12 | |
| aux10_map | ? | set aux10_map=13 | |
| aux11_map | ? | set aux11_map=14 | |
| aux12_map | ? | set aux12_map=15 | |
| rc_calibrated | ? | set rc_calibrated=1 | |
| bind | ? | set bind=0 | |
| short_throw | ? | set short_throw=1 |
Comments
Keywords: drones quadcopter fpv racing flight-controller FC flightone raceflight
Pages in category "Drones/Flight-Controller/Firmware/FlightOne"
This category contains only the following page.